
Hello! I am a currently a final year Master's student in Engineering Science at the University of Oxford. My interests primarily lie in control theory and dynamical systems; I love that they give us a unified framework through which to view a wide range of engineering systems.
This project was submitted for the B3: Group Design Project for an MEng in Engineering Science at University of Oxford.
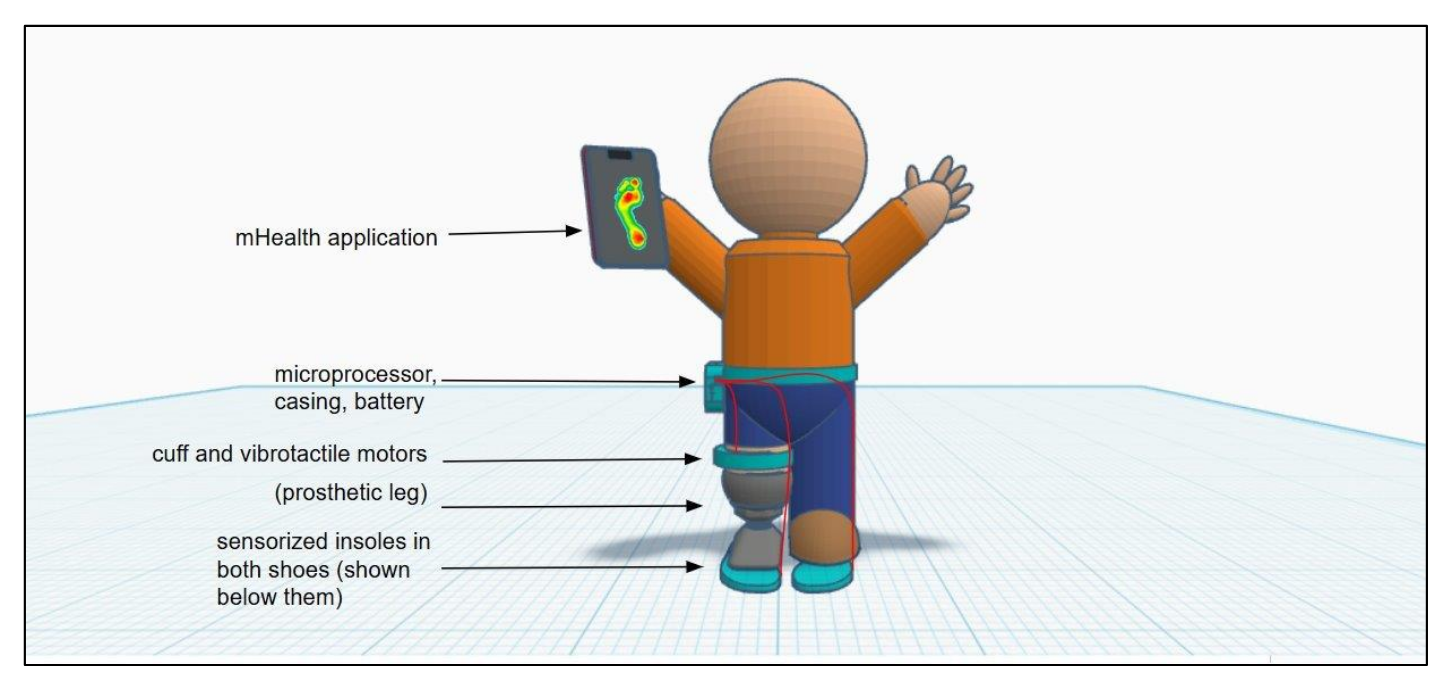
It describes the design of a novel somatosensory feedback replacement device to improve the walking gait of lower limb amputees. It was supervised by Professors Manus Henry and Perla Maiolino.

At the end of my second year of university, I entered the MathWorks Minidrone competition with 3 other Oxford students in Maths and Engineering. We programmed a quadrotor to use data from and onboard camera to follow an unseen path and land on a landing pad.
You can read more here.

This project focused on testing the convergence of gradient descent methods to find the optimal LQR controller for nonlinear systems with an appropriate Koopman-invariant subaspace. I then presented my findings at a poster presentation. It was supervised by Dr Jack Umenberger and Professor Paul Goulart. Poster